




Events in January 2018
-
PhD Seminars Special Edition - Network's Adventures in Softwar’land PhD Seminars Special Edition - Network's Adventures in Softwar’land
January 8, 2018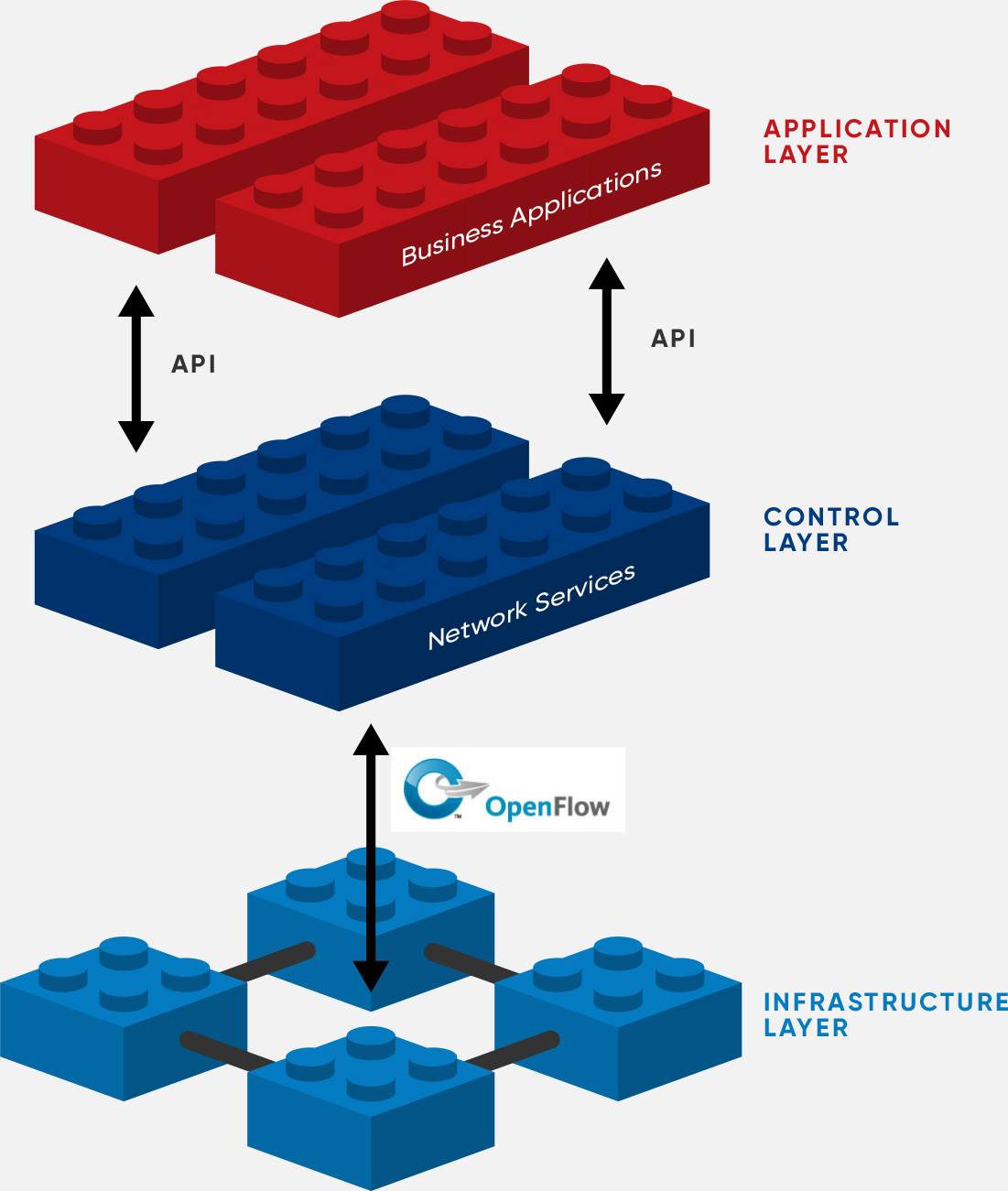
Speaker
Damien Saucez (DIANA)
Abstract
After decades of configuration and lack of flexibility, computer networks are progressively entering in the era of programmability and virtualisation. This radical change of paradigm implies to rethink the way networks are conceived and the tools that are used to manage them. In this talk, we will first understand the reason of this shift to programmability. We will then see that making the network fully programmable can cause contention and we will propose theoretical solutions to address this problem. Finally, we will see how the specific purpose of network equipments drive their actual feature set and how it influences the translation from theory to practice. In this talk, we will use methods from the following topics: network protocols, offline and stochastic optimization, control theory, and domain specific languages (DSL).
Image credits:
Open Networking Foundation,https://3vf60mmveq1g8vzn48q2o71a-wpengine.netdna-ssl.com/wp-content/uploads/2017/06/sdn-architecture-img.jpg, November 17th 2017
-
Networks, Systems and Services, Distributed Computing: Part VI Networks, Systems and Services, Distributed Computing: Part VI
–
January 22, 2018Talk 1
 Speaker
Speaker
Fernando I. Ireta Muñoz (i3s)
Title
Life-long Navigation and Mapping for dynamic environmentsAbstract
In this thesis a novel registration method called Point-to-hyperplane will be described, analyzed, compared and applied for pose estimation processes. The objective of this thesis is to investigate this general problem of visual mapping complex 3D environments that evolve dynamically over time and how to efficiently register and fuse the metric information obtained by a networked sensors. The aim is to build 3D models that can be employed for navigation task by locally and globally localizing sets of measurements obtained by different sensors. Therefore, in this thesis is provided a generalized framework of this novel method that investigate the problem for combining and fusing different types of measurements for pose estimation, which is widely employed for localization and mapping tasks in mobile robotics and computer vision. The proposed method allows to jointly minimize different metric errors as a single measurement vector with n-dimensions without requiring a scaling factor to tune their importance during the minimization process. Particularly, this thesis will focus on exploiting the proposed method for RGB-D pose estimation which consider color and depth information together. In this research, an increased convergence domain and a faster alignment w.r.t. classic approaches was demonstrated by considering a 4-dimensional vector (3D Euclidean Points + Intensities). Results in both, simulated and real environments, will be provided and it will be shown that the proposed method can be applied for a robust localization and an accurate mapping of complex environments. Finally, the performance of the method will be carried on visual SLAM and multi-view registration.Talk 2
Speaker

Yanis Boussad (DIANA)Title
The Smart and the Phone, Inside your SmartphoneAbstract
Making calls, sending SMS, listening to music, writing emails, playing games...are actions we take for granted thanks to one single device: a smartphone. This tiny computer combines cellphone and PDAs capabilities making it a "smart" and a "phone" device at the same time. This talk is about the hardware and software organization of smartphone, presenting its "smart" and "phone" parts and the loose coupling between them. I'll take the android smartphone as use-case to present it's software stack and the internal communication mechanism that ensures availability of the aforementioned actions on a single device.